
-
把工业机器人拉下神坛,也拉下“人谈”
信息来源:THINK浏览次数:13386次发布时间:2014-7-21 23:44:271.工业机器人是机器还是人?
一说到工业机器人,人们立马联想到的是动画片中的“变形金刚”或者电影里的“超人”。然而,现实中的机器人始终还是离人们塑造的“机器人”偶像有不小的距离。即使全球较先进的机器人,如日本本田公司的机器人也无非是一台更加智能化的仿人机器人,机器人终归是机器,而不是人。
我们来看看被中国粉丝们热炒的工业机器人是如何被定义的。“robot”一词在英文中的定义之广泛远非中文“机器人”一词可比,比如一台打印机可以叫做“robot”,一台智能化的机床也可以称为“robot”,即使大家熟知的智能手机Android系统也是被谷歌以“robot”定义的……机器人如此,更何况工业机器人呢。
“Industry robot”(工业机器人)一词的创立,就是为区别于上述广泛的“robot”,而被冠词“Industry”(产业)限定范围的,工业机器人顾名思义就是工业用途的“robot”(机器人)。 如果用中文给个较为精确的定义,应该叫做工业生产用智能机器,能被中文领域广泛接受的象形描述是“工业机械手臂”。
对!工业机械手臂!就是这么称呼的,我曾在展会、客户推介会上多次听到用户这样的称呼。对于该称呼我曾心里暗暗地表示不认同,就一字之差,“机械臂”一词抹杀了“机器人”的人格。然而,在行业里摸爬了2年后,终于能认同“机械手臂”的冠名和定义!因为,在你直观的视觉印象中它就是一个类似于手臂的机器而已,它并非神奇到像人一样智能化。
2.工业机器人系统组成
正如人的手臂的活动:由基础的骨骼肌肤构成、需要消耗能量通过肌肉伸缩、需要大小脑及神经系统控制动作。机械手臂也具有这样的结构组成:
(1)机械系统:
正如人的手臂从肩关节到手指,中间由肘关节腕关节、大小臂过渡构成。
机械手臂由机座、臂部、腕部及可旋转的“关节”构成,只不过这种构成是钢筋铁骨、冰冷机械的,无非就是钢铁或者铝合金的铸造件,铁块数件而已。而机器人的“关节”毕竟不能像人的关节一样是球形旋转的,而是扇面形旋转的。
整个的机械手臂就是依靠这样的结构组成,该部分因为和普通的机器并无二致,故称之为“机械系统”
(2)驱动系统:
如人的手臂需要肌肉的伸缩拉动,机械手臂的运动也需要这样能够提供能源的驱动部分。
机械臂驱动系统按动力源分为液压、气动和电动三大类。目前主流采用伺服电机驱动机器人运动,也可根据需要由三种基本类型组合成复合式的驱动系统。
私服电机驱动的方式之所以成为主流,因为伺服电机结合精密减速齿轮后,可以精确控制关节转动范围,目前可以精密到0.01mm级别。这不仅取决于伺服电机的精密程度,也更是与上一部分“机械系统”与下一部分“控制系统”紧密相关,有关伺服电机原理及减速齿轮在此不做赘述,兴趣者可搜索了解。

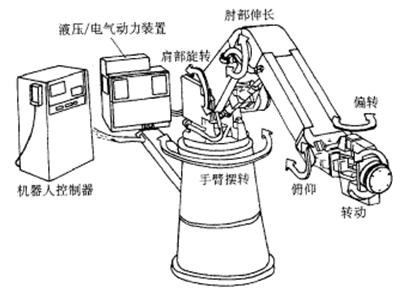
(3)控制系统:
人有头脑和神经系统,机械手臂之所以被称为“机器人”也与其本身有类似组成部分而得名,控制系统正式机械手臂的大小脑和神经网络。
控制系统是一个通过计算机软硬件平台及伺服驱动系统构成的“大脑+神经中枢”,机器人的精密运动(比如朝哪个方向转动多少度,以怎样的动作等)正是通过该部分精密计算后发号指令的。
居于控制系统核心的计算机通过操作系统及运动模型数据库(可以理解为伸展、收缩、转动等的模型),对各种动作指令进行数-模转换,并将一个动作(如向前伸展2m)分解为不同的关节运动范围,再由伺服驱动发送确定的脉冲(可以理解为力气)到各个关节上的伺服电机,伺服电机根据收到的指令精确转动。
整个运动指令可以通过人为操作编辑后形成计算机代码存放在电脑内存中,根据设定好的程序做动作,也可以通过外接的传感器(如机器视觉、力度传感等)收到的反馈信号做针对性的运动。实际上,之所以工业机器人能以“人”性却别与更多呆板的机器,也正是因为它通过计算机大脑能相对智能地处理外部信号。
3.机器人的轴、关节、自由度、结构形式(串联并联)
我们称机器人的1个关节为1个轴更合适,因为每1个关节只能完成一个维度的旋转。工业机械手臂因为“关节”数量的不同而区分,从简单的3关节到6关节不等,也有更多关节的机械手臂。
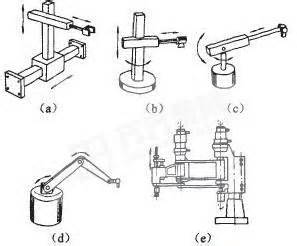
机器人的“关节”因部署位置的不同和组成结构不同,又被区分为“并联”(Δ)、“串联”、“水平串联”(Scara):形象地比喻,并联就像是平行四边形的两个对角,平行四边形发生形变时,对角的“关节”是同时对等运动的;而串联就像是人的手臂那样单向连接。
机器人的自由度由关节数量和关节连接形式决定。限于篇幅,不做赘述,在此通过对“并联”(Δ)、“串联”、“水平串联”(Scara)三种常见结构的形象比喻说明:
(1)“并联”(Δ)机器人被人们广泛称为“蜘蛛手”,因为尽管它有很多个关节,但它手指末端只能以一种确定动作达到一个点,蜘蛛手的末端总是朝向一个方向的。

(2)“水平串联”(Scara)机器人类似于玩具蛇,它的基本运动是在一个水平面内通过摆动“伸缩”,市面常见的Scara机器人因为末端加装了可上下伸缩的轴而能比玩具蛇更“灵活”一些,此处灵活仅指“蛇头”可通过下颚脱离咬合关节上下运动而已。4轴的Scara机器人和“蜘蛛手”一样只能做局限的动作,蛇头永远只能以一种确定动作达到一个点。

(3)“串联”机器人区别于上述的“蜘蛛手”和“眼睛蛇”,是因为它有根广阔的自由度,串联结构的机器人各关节的转动至少不在一个维度的平面内,所以它的末端可以灵活动作,典型的例子:机器人末端可以围绕空间一点做任意动作。

更多更精彩的机器人知识,请关注www.think-automation.com后续力作。欢迎订阅欣志机器人微信公众号:Think-automation。
同类信息推荐
-
暂无推荐信息
- 最新资讯
-

欣志铸造机器人应用案例——蜡模组树焊接自动化
本案为上海欣志为江苏某铸造厂提供的KUKA机器人自动化焊接组...
-
Amason物流中心的Kiva移动机器人
说到“工业机器人”,无论是机器人厂商还是机器人自动化集成商...
-
德国制造在中国—访通快机床太仓工厂
“中国或许是世界工厂,但是德国公司是世界工厂的制造者。”德国...