-
机器人建筑师—— 工业机器人在现代数字建筑结构设计中的成功应用
信息来源:THINK浏览次数:23748次发布时间:2014-11-24 16:08:14机器人依靠计算机控制和电气自动化技术实现的智能生产模式,正在迅猛地影响着人类社会的生产生活。就在前不久,国内顶尖的建筑设计院校——同济大学建筑与城规学院上演了精彩的机器人辅助建筑展览,上海欣志机器人系统有限公司作为主办方的设备与技术支持伙伴,携KUKA机器人应邀参与协助主办方成功实现了机器人建筑设计师的构想。
近期,“数字未来”DigitalFUTURE Shanghai2014展览成功举办。该展览展示了上海“数字未来”设计工作营系列学术活动的最终成果:拓展了机器人在国内建筑设计中的应用先例,尝试了应用机器人辅助建筑设计的可能性。
本展览围绕 “基于结构性能的机器人建造”(Robotic Fabrication Based on Structural Performance)为主题,主要关注机器人砖构、机器人木构、机器人仿生结构打印、机器人金属加工、机器人气模和3D混凝土非线性建筑打印等议题。

机器人建造师团队、展览开幕式合影
机器人砖构——“机器人砌砖”
基于单元砖体均匀分布的材料特性改变砖体之间的连接方式及空间发展方向,突破了长久以来其由本身的形态刚性及结构受压特性所产生的空间结构极限。
本项目通过砖体的形式文法生形以及墙体的结构性能优化,并通过遗传算法对产生结果进行优化筛选,使得砖这种古老材料在其本元意象的和传统做法中寻找结构性能上的更多可能性。
本案采用1台6关节的KUKA机器人KR6 R700小型工业机器人作为砖构实现机构,机器人安装于带定位机构的移动砌砖工作台,可分步实现区块内的砖构墙面搭建,并最终拼接形成一段稳定连续而有具有强烈视觉冲击力的砖墙序列。
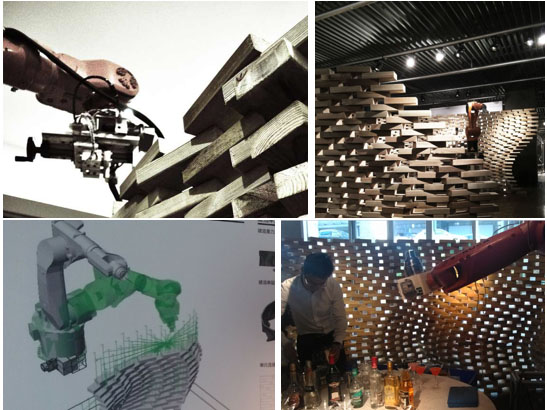
野心勃勃的机器人在完成前面砖构后,又在协助调酒师进行一场庆功宴中的调酒准备。(Think-Automation 出品)
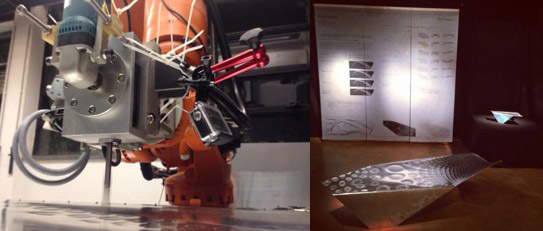
机器人金属加工——
板材为人们所见的轻与薄并非如我们想象的那样普通。在薄于一毫米的材料内的受力根据施力点的不同有着截然不同的结构表现。
本项目用数字技术进行针对板材的拓扑计算和优化通过机器自动化转化为集美学和结构性能于一体的日常物品:桌子。一张完全不具备承重性能的薄铝板在经过机器敲击后达到了其在给定条件下的较佳结构性能。精准的机器加工赋予了我们设计师从数字模拟到实际施工的较完美的转换。所谓基于结构性能的机器建造。
本案采用1台KUKA机器人KR90,加装机械压花模块后,通过设计师编制的空间运行轨迹,在立体的金属板表面进行构造加工。
机器人木构——
在长达数千年的中国传统木构建筑的发展历程中,大量的实践积累和总结产生了各式各样的构件,做法和尺度,从而形成了一套基于经验的庞大木构系统。
本项目抽取了传统木构建筑中“檐椽”这一元素,希望通过新的结构性能模拟优化和机器人加工手段对这一传统元素的结构性能进行优化与重新演绎。《营造法式》中对檐椽的出挑比例有明确的规定,我们通过结构计算与优化软件对这一出挑比例进行了验算与优化,结合由三根杆件形成的基本的三角形自支撑单元,设计了一套新的结构体系。
整个结构装置由七个单元组成,虽然这七个单元遵循同一种逻辑,但杆件的长度,倾斜角度和搭接位置各不相同,而机器人的精确加工能力能够很好的解决这些问题,使得本装置的结构意图得到完美呈现。
本案中机器人间接地参与了木拱结构的搭建,机器人加装铣削工具后可对木条进行边角处理、榫头加工等作业,并在最终成型时协助设计师完成木拱的拼装搭建作业。

中国传统的木构与数字化建造技术结合会有什么惊人的创作呢?在三周时间中,通过数字化软件以及机器人加工技术,将拱形、互承结构和人工建造相结合,完整地表达了从设计概念到实际施工全过程。首先在研究传统木构之后,确定了基本的结构单元的形式。拱体的曲面通过受力分析软件犀牛(Rhino Vault)生成,而互承结构单元作为结构的整体附在拱形之上,使结构受力能仅仅通过自身的受力关系实现支撑。运用千足虫(millipede)对杆件受力进行了优化,分析了多种情况下的受力关系。并最终将其归为三类尺寸。
本案使用了五轴机床对材料进行了加工。确保了每一根杆件的精确度,避免了加工误差累计对后期搭建的影响。节点的连接方式是沿着杆件方向用螺钉连接。互承结构创造两套网格体系,丰富了空间感受。
机器人加装高速电主轴及铣削工具后,可组成1台高柔性大范围作业的多轴立体雕刻机,能进行大型木像雕刻、模型制造的那个,详见欣志机器人——机器人雕刻(http://www.think-automation.com/showpro.asp?id=60)栏目。
机器人复合材料3D打印——
在本次同济建造营中,重点探索和测试了一种基于材料本身的自主建构方式。美国RPI以及来自密西根大学的Matias del Campo教授和Sandra Manninger教授一直在探索一种“无定型的建构系统”,该系统基于材料适应性的新型建筑设计理念,充分发挥不同材料特性而诞生出理想的构建方式。
诸如混凝土浇筑、真空成型和滚塑成型等建构系统依赖的均是一种自上而下的建构方式,在这一过程中,建构方式只是最终实现预想形态的一种工具;而自主建构依赖的却是一种自下而上的建构方式,多种作用因子会影响建构的过程,从而给结果带来诸多意外的属性和惊喜。在建造过程中,我们使用了一种基于机器人的反馈系统。
机器人能够迅速结合塑料材料在竖直方向上的力生型并进行评估。这种技术通过一种偶然性建模达到最后的找型结果,提供了一种产生可供选择性的,运用第三方式来制造出优缺点均偶然性的二元模型的方法。这种偶然性正式我们此次运用在建造营中的找型方式。
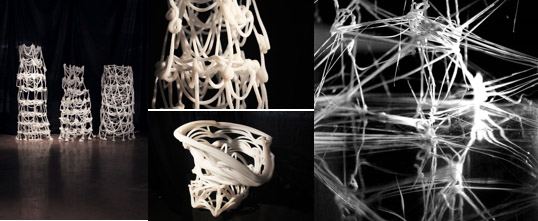
机器人仿生结构打印——
空间6D打印装置,是一项结合KUKA机器人与3D打印技术的创新。空间打印提供了3维成型的基础,6D指的是机器人的6轴,提供了灵活多变的打印路径。传统的3D打印方式依照水平切片打印,而后叠合形成整体模型,这个过程仅仅反映了模型的成型状态,并没有反映结构的自然生长与建构逻辑。
本项目从仿生学的角度出发,学习了蜘蛛吐丝织网的建构过程:一种由一点开始,沿着结构路径生长出复杂空间的自然建构逻辑。我们对传统的打印设备进行了优化:利用KUKA机器臂承载打印工具头,可在空间中沿不同路径打印空间曲线。与此同时,打印工具头采取了可变的机械设计,4个打印喷头中,3个喷头可以规律性地一张一合,据此可以改变打印过程中线材定型时的截面形状,形成和蜘蛛丝类似、具有结构强度的线材。(Think-Automation 出品)
这些改动,与其说创新,不如说是回归:当机器臂大幅度运转、打印头一张一合、空间结构沿着3维路径慢慢生长时,正是机器人技术向自然建构的回归。
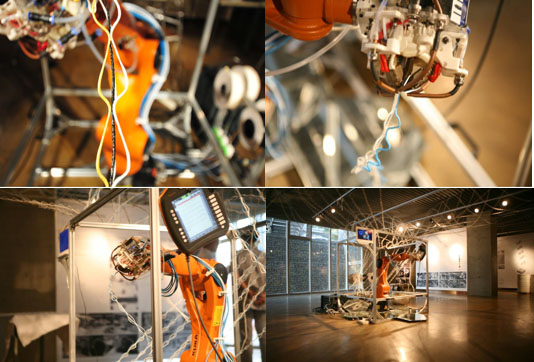
KR 6R700机器人正在全身心投入地进行着“仿生建筑设计”。Think-Automation
上海欣志机器人系统有限公司是国内领先的机器人自动化公司之一,欣志机器人已累计供出200+套机器人自动化系统,并与同济大学、上海交大等多家国内知名院校及科研机构建立了良好的合作关系。
更多有关机器人前沿应用技术、机器人自动化工作站、校企合作事宜,欢迎前来咨询洽谈,上海欣志机器人公司驻昆山工厂联系电话:0512-50315123。
同类信息推荐
-
暂无推荐信息
- 最新资讯
-

欣志铸造机器人应用案例——蜡模组树焊接自动化
本案为上海欣志为江苏某铸造厂提供的KUKA机器人自动化焊接组...
-
Amason物流中心的Kiva移动机器人
说到“工业机器人”,无论是机器人厂商还是机器人自动化集成商...
-
德国制造在中国—访通快机床太仓工厂
“中国或许是世界工厂,但是德国公司是世界工厂的制造者。”德国...