
-
折弯机器人——机器人折弯中心上下料
信息来源:THINK浏览次数:34069次发布时间:2014-11-27 16:07:37本机器人折弯系统为Think Automation为山东瑞帆机械提供。该套机器人折弯解决方案由库卡机器人KR90与亚威PBH系列数控板料折弯机构成,并根据需要设计了上料定位机构与板材抓手。交付使用的机器人系统代替工人进行自动化折弯上下料作业,KUKA机器人系统与亚威机床实现了同步协同作业,完全达到了实际的生产需要。(http://www.think-automation.com/showc.asp?id=26)
一、项目背景:
在改造之前,瑞凡工厂折弯工序的板材上下料一直保留着传统的人工传送方式。而较新需要折弯作业的板材为3mm厚、3m×1.5m的大尺寸碳钢板材,该产品的折弯作业人工操作难度大,需要的体力劳动强,且产生潜在的安全隐患风险。
为能以降低生产成本并提高产品品质,用户希望在经济的投资原酸范围内,能提供一种自动化的解决方案,并且能保证改造后的设备具有高度的稳定性、可靠性和自动化程度。
Think Automation在沟通用户需求后,发现了另一潜在的需求:设备市场的竞争变化要求改造后的系统具有一定的柔性生产能力——适应多批次、小批量产品生产间的快速切换。由此,双方达成了一致的改造方案思路——采用多关节机器人上下料。
二、潜在问题:
1.基于经济实用性考虑,整个自动化改造项目成本控制严格,Think Automation首要考虑的是在有限的预算内实现较优化的系统构造。
2.上下料的便利性:由于本案暂不涉及自动化生产连线,前道的金属板来料为人工集中送入,这就需要考虑如何应对人工上料后形成的定位误差。
3.该金属板材用于果树加工机械设备的钣金件,因此整个加工过程需要尽力实现无刮痕的作业目标。
4.在机床本身数控系统DELEM不完全开放的前提下,实现机器人折弯动作与机床进刀动作的同步。
5.折弯机工作台面较低,而机器人作业需要保证有一定的净高空间。
三、Think Automation提供的解决方案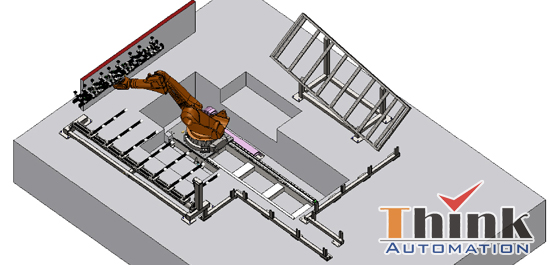
1.现场布局设计:Think Automation为瑞帆设计了一种四工位机器人自动化系统,整个系统呈“十”字形布局:机器人居中,分别对应折弯机、人工集中上料暂存、重力对中定位架、成型产品下料台。该种设置方式布局紧凑,节省了工厂空间,提高了工位间的转换作业效率。
2.机器人选型问题:
3m×1.5m,3mm厚板材,重约100多kg,如此尺寸与体量,机器人系统的设计及选型均需要慎重考虑:为此,在综合估计了机器人手臂活动范围与作业区间尺寸的匹配性、抓手自重重量及抓取金属板后的重心偏离因素、以及机器人末端有效负载衰减曲线,Think Automation为用户选择了KUKA机器人KR 240 R2900。
该款机器人属于KUKA家族 QUANTEC-ULTRAS系列,该系列机器人具有在重负荷情况下提供较佳绩效和无限动态特性的性能优点。KR 240 R2900机器人作用半径大至 2900 毫米,而机身只有 1145 公斤的自重,并可轻松操作处理高达 240 公斤的负荷。
3.机器人作业空间的拓展与机动性能的提高:
尽管KR 240 R2900机器人具有2900 毫米的臂展半径,但这在该项目中并不能完全满足大尺寸产品折弯作业中的翻转空间需要,因此,Think Automation为机器人加装了3M的行走机构(与机器人集成于一体的直线导轨,导轨伺服作为第7轴直接接入KUKA机器人控制系统进行集中控制),以较大化发挥机器人机动性能,提高作业空间的宽度,以减少大尺寸产品折弯作业期间转向时的周边设备干涉影响。
4.折弯用机器人抓手设计:
产品重量已超过100kg,考虑机器人末端有效负载衰减及板材产品抓取后的中心偏离等因素,即使选择240kg负载的机器人,也需要更进一步优化抓手设计,使得抓手在保持结构稳定的前提下,尽可能降低自重,以使得机器人作业效率更高、更节能。用户对于板材表面无刮痕作业要求,需要Think Automation考虑抓手的优化设计,以保证抓取后的受力平衡、表面无损伤。
基于以上考虑,Think Automation设计了航空铝型材结构作支撑的框架构造作为抓手支撑,厚唇边单层吸盘组以9×3的矩阵平均分布于型材支架上,并由9组阀体分组控制真空。
该设计方案由Think Automation机械工程师据多年的经验,并吸取了国外成熟的应用技术后,独立设计而成。交付使用的抓手吸取板材稳定,形成真空速度快,搬运作业中受力均衡,且结构坚固耐用。
5.折弯前后的上料及下料机构的设计:
在现场无自动化连线的前提下,Think Automation设计了建议可靠的成品储料架及集中上料对方机构。集中上料定位机构为一焊接制成的直角型导向机构,只需要人工用叉车将一托班板材集中叉放到导向机构内即可。机器人抓取作业时通过光电信号及抓手真空度检测判断板材位置。
因机器人本身具有稳定可靠的高重复定位精度,且折弯后的产品无需很高的码放要求,因此下料机构同样为一带直角型导向阻隔机构的简单码放工作台。
6.折弯产品抓取前的中心定位精度控制:
折弯作业需要精确的定位精度及对准位置,而该案中靠人工集中上料放置的板材不具有可行的位置精度,且人工作业的随机性无法保证一致性。Think Automation为用户设计了专用的重力中心点定位架——一副双角度倾斜的滚珠定位架(详见图示)。而该定位架的巧妙之处在于充分利用了产品自重与一致整齐的边缘特性及机器人的动作柔性,且并未耗费太多的检测及电子机械结构。
机器人在抓取人工堆置的板材后,现将板材移放到定位架(该过程机器暂不需要考虑精确定位问题,只需要模糊匹配即可),抓手松开后,铁板通过自重作用下,通过部署于定位架底部的若干滚珠及两角边上的滚轮滑动到角落。此时,机器人再从程序设定好的中心点位置进行二次抓取后,搬移到折弯机进行作业。
7.机器人作业空间的优化:
考虑到现场的折弯机床不做加高处理(以方便后期可能的改造及检修的方便性),而同时要为机器人作业留足净高空间,因此,Think Automation设计了安装机器人用的地沟,机器人“藏身”于地沟中作业,其手臂抓取产品后悬举在上空进行折弯过程中的翻转动作。同时,该种设计方案使铁板作业中的搬运高度降低,方便了人工集中上料、成型产品送出的便捷性,也降低了安全风险并增加了现场的美观性。
8.折弯机与机器人同步作业:
PBH系列数控板料折弯中心的DELEM数控系统并不完全开放,机器人与其实现完全的同步作业理论上是可能也可行的(在国外已有成熟案例),但限制于商务因素及双方开放性技术协议与程序通信调试打来的各种麻烦及可能的不可控成本因素,而且该项目应用中并未过高要求折弯机与上下料机构的同步精度,因此,Think Automation建议用户采取了折衷方案:通过IO点位信号实现同步协同。
该同步方案的实施,需要系统调试与机器人编程工程师的经验,Think Automation工程师以出色的技术及经验解决了这一难题,并赢得了客户的认可与赞许。

四、系统构成:
机器人:1、德国KUKA工业机器人KR 240 R2900 ULTRA (KR QUANTEC ULTRA),最大作用范围2896 mm,240kg有效负载,±0,06 mm重复定位精度。
2、KRC4机器人控制系统:多核处理器,60G硬盘,基于Windows平台的控制系统,历经验证的底层架构与控制方案。
3、SmartPAD示教器:6.5英寸真彩触屏,6D鼠标旋钮,防疲劳与紧张设计按钮,人体工程学按键与界面设计。
机器人的周边设备(Think-Automation 出品):
1、机器人抓手:铝型材框架结构、多组分控制真空吸盘
2、上料定位导向机构:直角形钢结构导向架,托盘定位
3、中转定位机构:重力式自动定位台
4、下料装置:直角形钢结构导向架
5、检测装置:真空检测(用于检测是否吸取金属板或偏离故障)、到位检测
7、电器控制:机器人与折弯机通讯、抓手与周边机构信号控制
8、安全围栏及安全门
折弯机上下料机器人系统集成主要由机器人和周边设备两大块有机组成,而在整套系统的集成实施过程中,则不仅仅汇入了瑞帆公司与欣志人的创造思路与劳动汗水,还有KUKA机器人团队与众多零部件供应商的合作支持。项目实施的成功,并不是凭借Think Automation一己之力,即使算得上成就,那也是我们站在了巨人们的肩膀上,或者说是先贤们的引导下前进了一步。
五、改造后的自动化系统成效
1.高产能高效率:如众多自动化系统功效一样,瑞凡机器人折弯系统为工厂折弯效率的提升做出了很有说服力的贡献——至少,机器人解决了人工作业的劳动强度与安全风险难题,同时,可24小时连续无疲劳作业的特性是无与伦比的。
2.高柔性高稳定性:机器人通过计算机系统控制,如数控一样的便捷变成操作,KUKA机器人自带的多功能人体工程学示教器,工厂设备工程师可通过示教器快速进行新产品适应性的程序切换。(Think-Automation 出品)
3、高品质高一致性:±0.06mm重复定位精度,75,000+小时平均无故障间隔,KUKA机器人以德国技术标准获得了广泛的市场认可。
六、项目总结与分享:
出色的机器人自动化方案,并不需要堆叠一大堆专业的自动化机构与控制软件(尽管有时这种方式显得很重要),根据实际的需要出发而产生有价值的解决方案,才是为众人认可的。
如本机器人折弯上下料方案中,欣志机器人为瑞凡提供的设备服务中并未涉及到诸如激光位置检测、KUKA离线编程、折弯软件 包BendTechPro等看起来神乎其神而用起来价格不菲的东西,但同样满足了用户提出的需求。即使在未来有可能拓展到更高程度的自动化,加装一些功能包也是完全可行的。
更多机器人折弯上下料自动化资讯,欢迎致电上海欣志机器人系统有限公司0512-50315123,与我司业务担当人员咨询交流。同类信息推荐
- 最新资讯
-

欣志铸造机器人应用案例——蜡模组树焊接自动化
本案为上海欣志为江苏某铸造厂提供的KUKA机器人自动化焊接组...
-
Amason物流中心的Kiva移动机器人
说到“工业机器人”,无论是机器人厂商还是机器人自动化集成商...
-
德国制造在中国—访通快机床太仓工厂
“中国或许是世界工厂,但是德国公司是世界工厂的制造者。”德国...